|
I am a tenure-track Assistant Professor in Institute of Trustworthy Embodied AI (TEAI, 可信具身智能研究院) at Fudan University, and a member of the Fudan Vision and Learning Laboratory. Previously, I received my B.Eng (IEEE Elite Program & Zhiyuan Honor Class) and Ph.D. (Wu Honor Class) in Computer Science at Shanghai Jiao Tong University, with the greatest fortune to be adviced by Prof. Junchi Yan. I am the recipient of CCF-CV fellowship (CCF-CV新锐) and SJTU Scholar Star (上海交大学术之星). I have worked with (chronological order): Prof. Xiaofeng Gao at SJTU, Dr. Da Zheng and Prof. Zheng Zhang at Amazon, Dr. Wei Zhan , Dr. Liting Sun , and Prof. Masayoshi Tomizuka at UC Berkeley, Prof. Hang Zhao at Tsinghua University, Prof. Hongyang Li at HKU, Dr. Shaoshuai Shi at MPI-INF. |
|
|
I am interestied in Embodied AI and Autonomous Driving. Currently, I am focusing on (i) building authentic world simulators with generative models & reconstructive models and then (ii) combining imitation learning & reinforcement learning to train decision-making agent in an end-to-end way.
|
|
* denotes Co-First Authors |
|
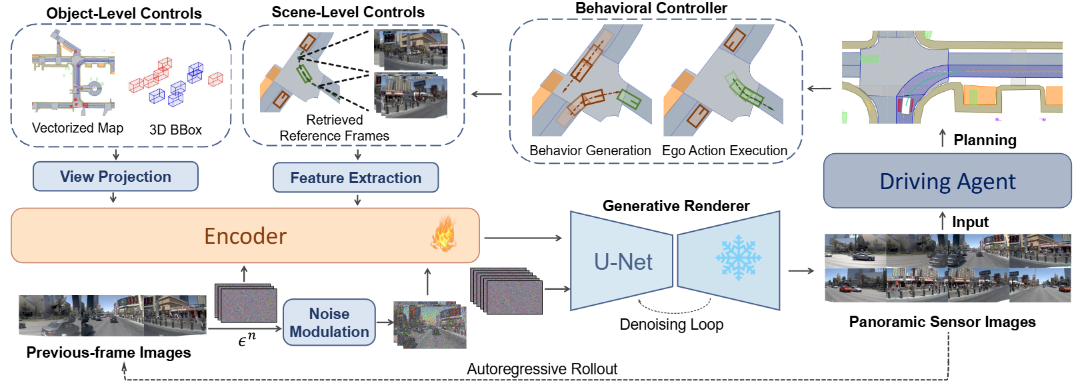
Junqi You*, Xiaosong Jia*, Zhiyuan Zhang, Yutao Zhu, Junchi Yan arXiv, 2024 Clsoed-loop autonomous driving benchmark based on generative models which could replay real world data in a reactive way. |
|
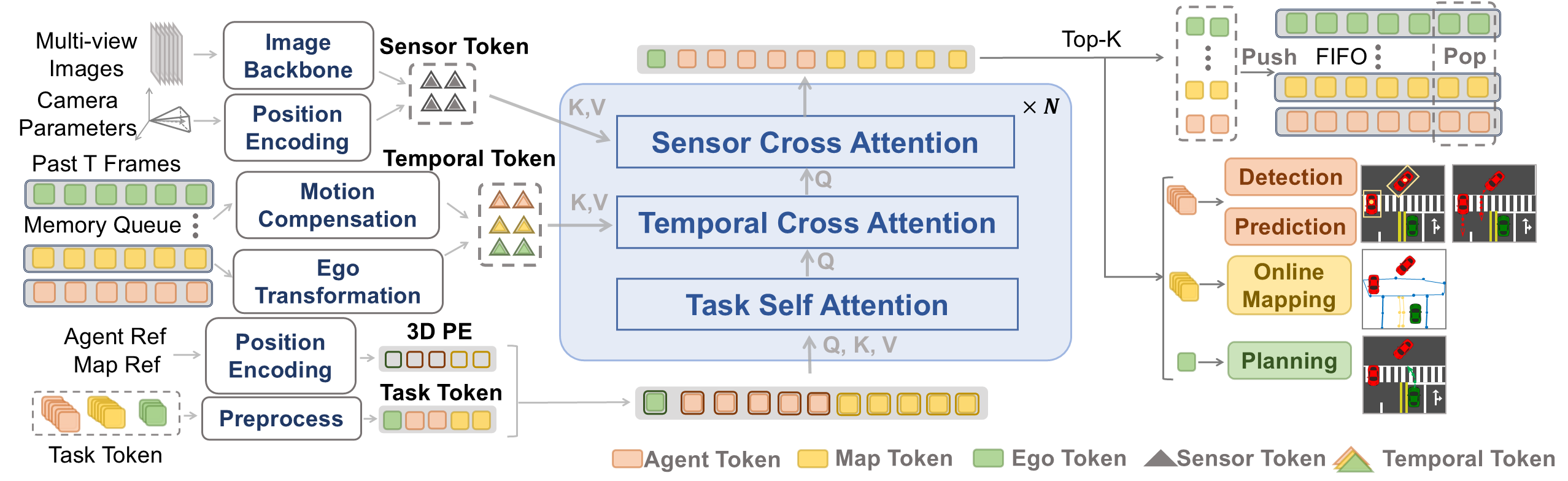
Xiaosong Jia*, Junqi You*, Zhiyuan Zhang*, Junchi Yan ICLR, 2025 Unifying all tasks with queries and attention. Strong Scaliability. |
|
Yutao Zhu*, Xiaosong Jia*, Xinyu Yang, Junchi Yan ICRA, 2025 Transformer based Fusion with 73.7 NDS + 10.1 FPS in nuScenes val set. |
|
Xiaosong Jia*, Zhenjie Yang*, Qifeng Li*, Zhiyuan Zhang*, Junchi Yan NeurIPS Datasets and Benchmarks Track, 2024 First benchmark for multi-ability end-to-end autonomous driving. |
|
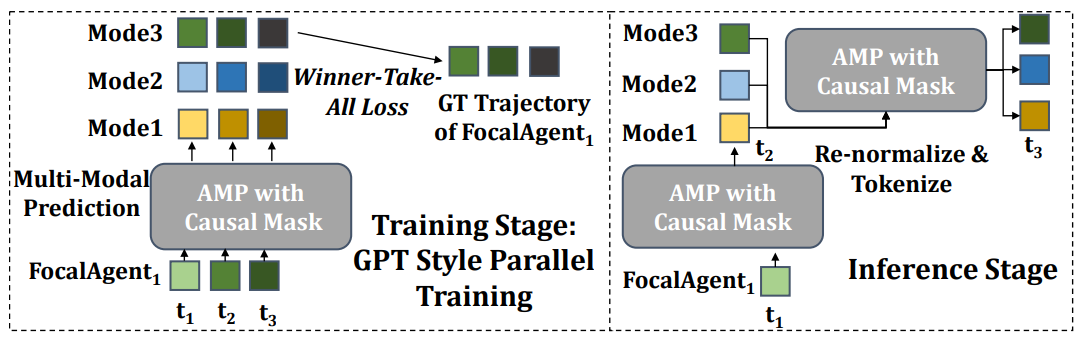
Xiaosong Jia, Shaoshuai Shi, Zijun Chen, Li Jiang, Wenlong Liao, Tao He, Junchi Yan arXiv, 2024 GPT-style Motion Prediction. State-of-the-art performance on Waymo Motion. |
|
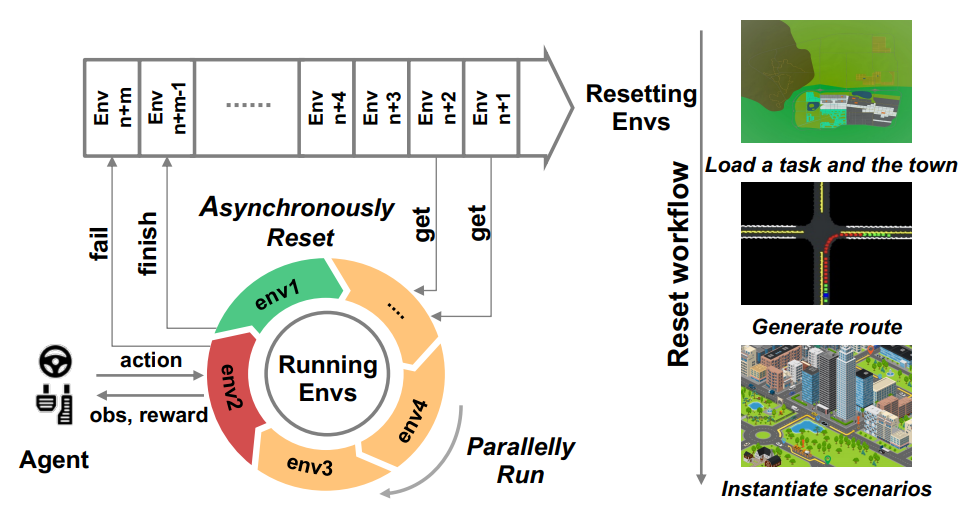
Qifeng Li*, Xiaosong Jia*, Shaobo Wang, Junchi Yan ECCV, 2024 World model based reinforcement learning for autonomous driving. The first & only learning-based model could solve 39 complex scenearios in CARLA Leaderboard 2.0. |
|
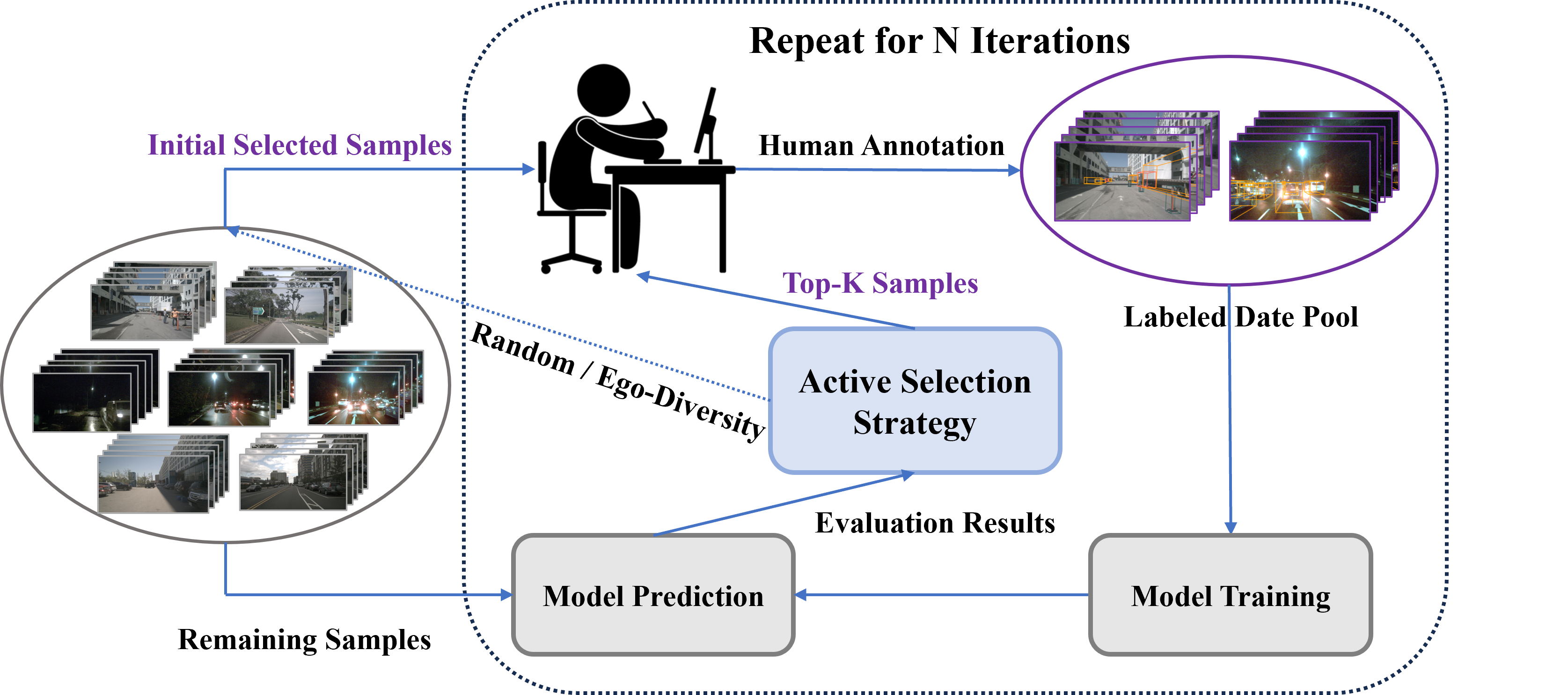
Han Lu*, Xiaosong Jia*, Yichen Xie, Wenlong Liao, Xiaokang Yang, Junchi Yan arXiv, 2024 Planning-oriented data selection for end-to-end autonomous driving. Training with 30% data beats full data. |
|
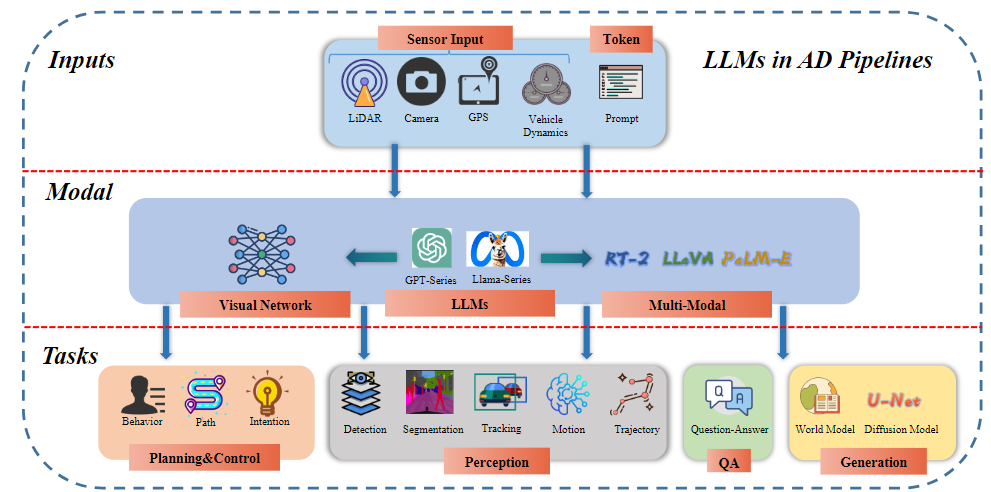
Zhenjie Yang*, Xiaosong Jia*, Hongyang Li, Junchi Yan arXiv, 2023 The first survey of LLM for autonomous driving. 800+ stars. Continuous updating. |
|
Xiaosong Jia, Yulu Gao, Li Chen, Junchi Yan, Patrick Langechuan Liu, Hongyang Li ICCV, 2023 (Oral Presentation) New paradigm for end-to-end autonomous driving without causal confusion. |
|
Xiaosong Jia, Penghao Wu, Li Chen, Jiangwei Xie, Conghui He, Junchi Yan, Hongyang Li CVPR, 2023 BEV-based scalable end-to-end autonomous drving model. |
|
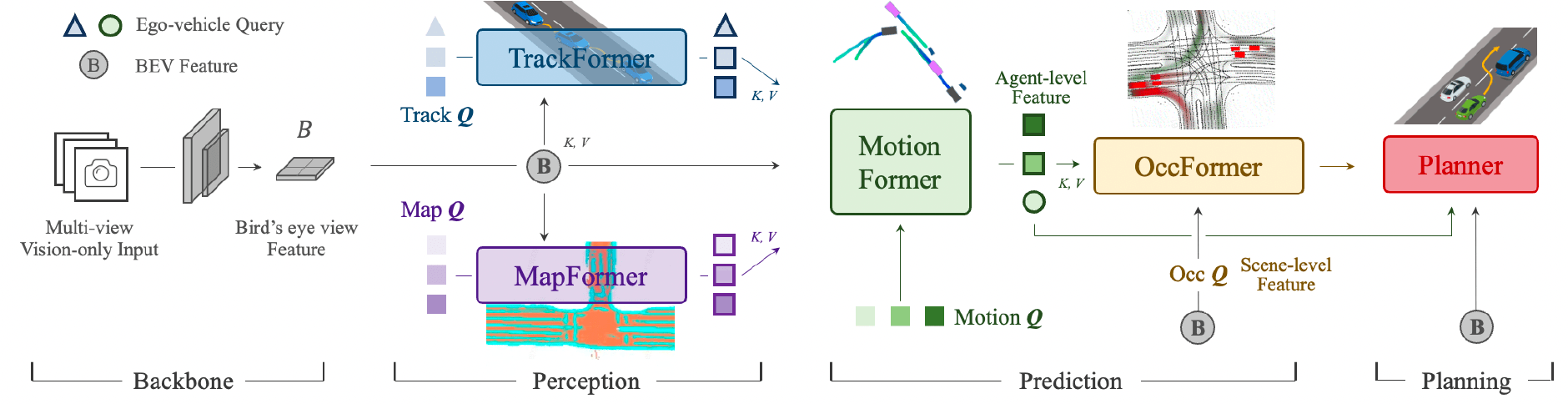
Yihan Hu*, Jiazhi Yang*, Li Chen*, Keyu Li*, Chonghao Sima, Xizhou Zhu, Siqi Chai, Senyao Du, Tianwei Lin, Wenhai Wang, Lewei Lu, Xiaosong Jia, Qiang Liu, Jifeng Dai, Yu Qiao, Hongyang Li CVPR, 2023 (Best Paper Award) All modules in one Transformer-based end-to-end network for autonomous driving. |
|
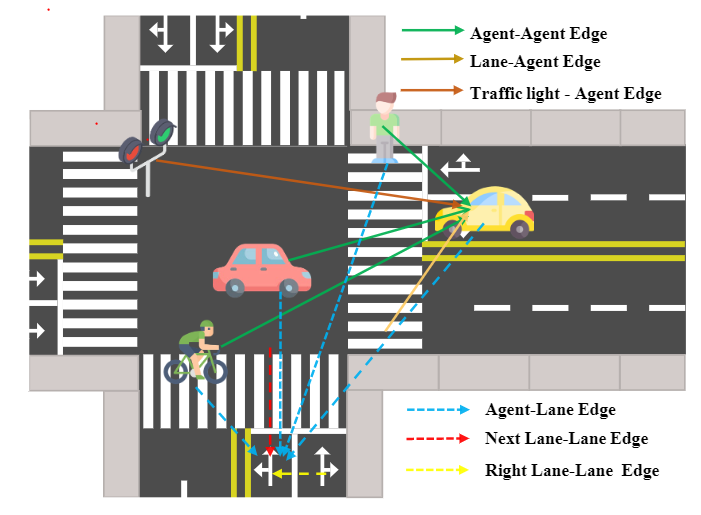
Xiaosong Jia , Penghao Wu, Li Chen, Hongyang Li, Yu Liu, Junchi Yan TPAMI, 2023 Unified heterogeneous graph neural network for driving scene encoding. SOTA methods on INTERACTION and Waymo challenge. |
|
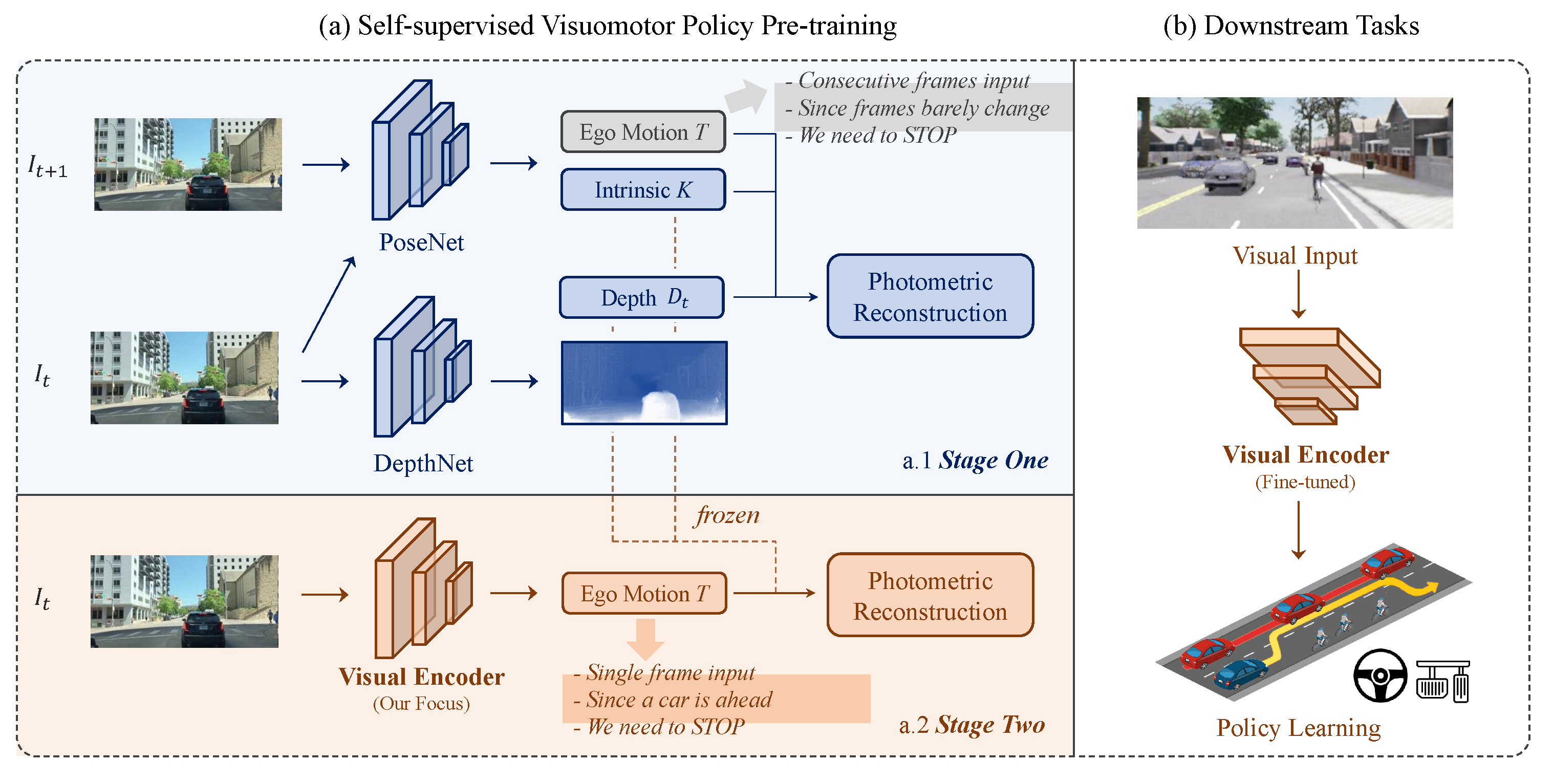
Penghao Wu, Li Chen, Hongyang Li, Xiaosong Jia, Junchi Yan, Yu Qiao ICLR, 2023 Self-supervised pretraining for policy learning |
|
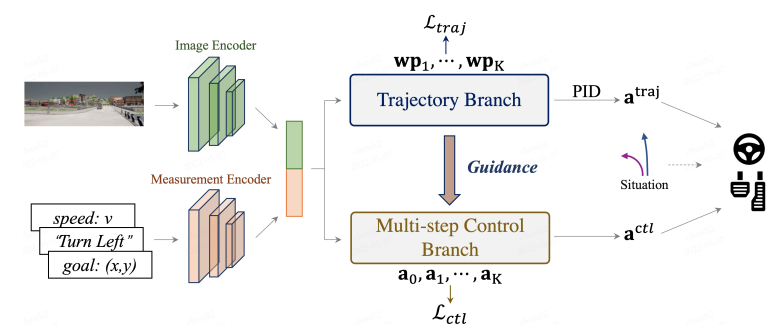
Penghao Wu*, Xiaosong Jia* , Li Chen*, Junchi Yan, Hongyang Li, Yu Qiao NeurIPS, 2022 Trajectory-guided control paradigm for end-to-end autonomous driving. 1st method on Carla Leaderboard, with only a monocular camera, outperforming other methods with multiple cameras and LiDAR by a large margin. |
|
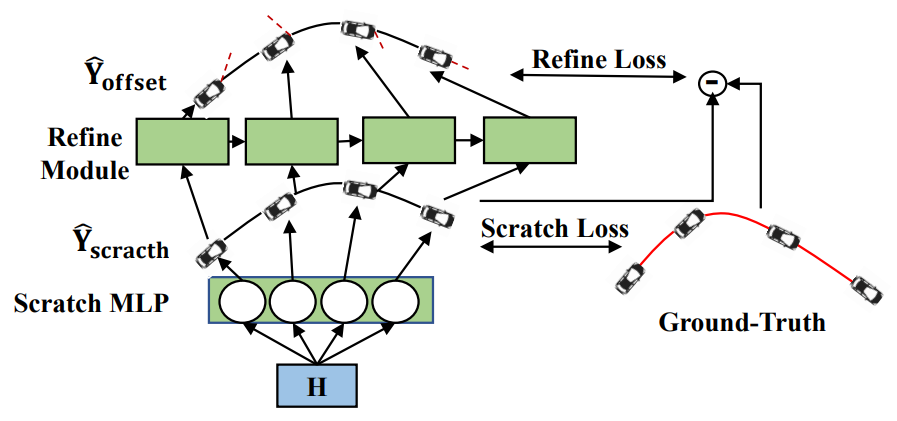
Xiaosong Jia , Li Chen, Penghao Wu, Jia Zeng, Junchi Yan, Hongyang Li, Yu Qiao CoRL, 2022 A plug-and-play module for trajectory prediction by enhancing the temporal correlation among the predicted time-steps. |
|
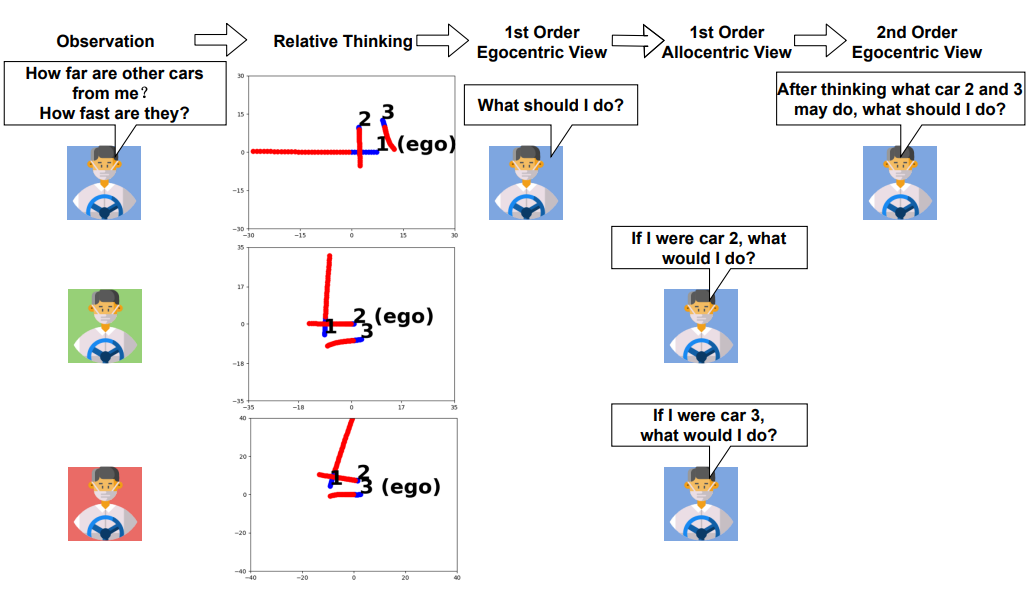
Xiaosong Jia , Liting Sun, Hang Zhao, Masayoshi Tomizuka, Wei Zhan CoRL, 2021 ICCV Mair2 Workshop, 2021 (Best Student Paper Award) Rethink the invariance property of the coordinate reprentation for trajectory prediction. |
|
Wei Zhan, Liting Sun, Hengbo Ma, Chenran Li, Xiaosong Jia, Masayoshi Tomizuka Co-organized the competition in ICCV 2021. I was responsible for the design and implementation of the Joint Prediction and Conditional Prediction Tracks. |
|
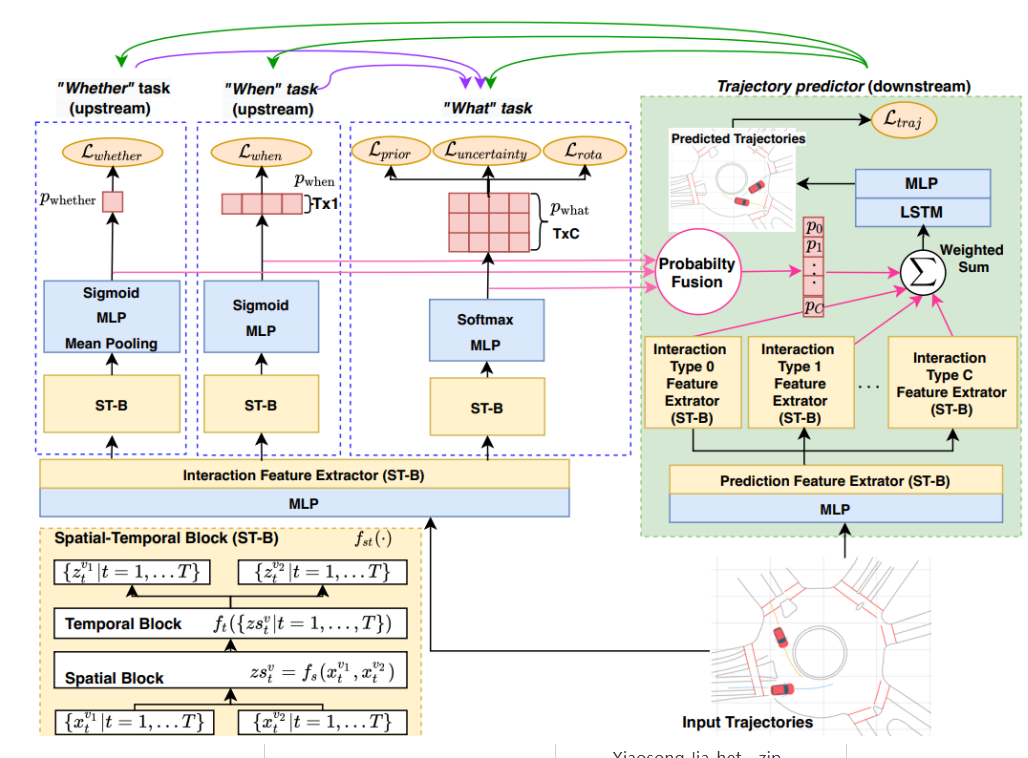
Xiaosong Jia , Liting Sun, Masayoshi Tomizuka, Wei Zhan RA Letters, 2021 ICRA, 2021 Unsupervisedly extracting interactive behaviors in a whether, when, and what hierarchy. |
|
This website's source code is from Jon Barron |